Dal Codex Atlanticus al batiscafo Trieste

Immaginate di svegliarvi un mattino e che per caricare l’articolo di un quotidiano sul vostro dispositivo mobile dobbiate aspettare circa un’ora, per poter effettuare una videochiamata dobbiate avvicinarvi talmente tanto all’altro dispositivo che avrebbe più senso guardare l’interlocutore direttamente negli occhi.
Immaginate che usciti di casa non ci sia alcun segnale GPS per aiutarvi nella navigazione e che in ogni caso le mappe a disposizione siano estremamente incomplete. No, non vi siete svegliati indietro nel tempo di circa quarant’anni. Questo infatti è quello che accadrebbe se vi trovaste a bordo di un mezzo subacqueo appena qualche metro sotto la superficie. Se poi voleste scendere in profondità, ci sarebbe un’ulteriore complicazione, quella che Jules Verne racconta nelle prime pagine del celebre “Ventimila leghe sotto i mari” con le parole del professor Aronnax e cioè che per ogni 10 metri di profondità discesa, avreste circa 10 tonnellate in più che premono su ogni metro quadrato del vostro veicolo.
Don Walsh e Jacques Piccard, a bordo del batiscafo Trieste, un mezzo di progettazione svizzera e produzione italiana, il 23 gennaio del 1960, arrivarono a circa 10.916 metri di profondità dell’Abisso Challenger, all’interno della Fossa delle Marianne, trovandosi schiacciati da circa 10 milioni di chilogrammi su ogni metro quadro del loro scafo. La stessa impresa fu ripetuta in solitaria soltanto 52 anni dopo, nel 2012, dal regista James Cameron, a bordo del mezzo Deepsea Challenger.
Proprio Leonardo da Vinci, precursore dell’osservazione e dello studio dei fenomeni fluidodinamici, fu il primo a ipotizzare il funzionamento di un mezzo sommergibile, come testimoniato dai suoi appunti nel “Codex Atlanticus”, ma si ha dimostrazione che solo intorno al 1620 un vettore riuscì a percorrere un breve tratto in immersione a circa 3 metri nel Tamigi e che alla fine del Settecento, dopo qualche tragico fallimento, venne utilizzata l’idea del sottomarino a scopi bellici. David Bushnell a bordo del Turtle, un piccolo mezzo di 2 metri dotato di carica esplosiva, provò senza successo ad affondare nel 1776 la nave ammiraglia della flotta inglese nel porto di New York. Fu però solo fra la fine dell’Ottocento e i primi del Novecento che lo sviluppo tecnologico in questo ambito ebbe un’evoluzione rapidissima. I progetti dei sottomarini si susseguirono fino a integrare tutte le funzionalità che li hanno resi caratteristici ai giorni nostri, come il motore elettrico (e in seguito a propulsione nucleare) per la navigazione subacquea, le casse di compensazione e l’arma subacquea che si stava affermando in parallelo, il siluro.

Proprio in tale contesto furono gettate, dall’ingegnere e imprenditore Robert Whitehead, le basi storiche degli sviluppi tecnici che oggi costituiscono l’eredità per gli stabilimenti di Livorno e Pozzuoli della Leonardo S.p.A., un’eccellenza tecnologica tutta italiana nello sviluppo di sistemi di difesa subacquei. Di questa storia fanno parte illustri scienziati, come Carlo Calosi (nel periodo del secondo conflitto mondiale) o Aldo De Dominicis (negli anni Ottanta), che hanno contribuito a rendere il nostro paese indipendente nelle tecnologie subacquee e in particolare nella progettazione e realizzazione dei dispositivi in grado di sfruttare il suono come mezzo di comunicazione: i sonar.
I sommergibili, i siluri e i mezzi navali utilizzano appunto i sonar per individuare bersagli e ostacoli, comunicare, o mappare il fondale marino. Sott’acqua, infatti, la propagazione delle onde elettromagnetiche non è possibile, se non a bassissime frequenze. Non esistono dunque i radar o i classici apparati radio, inoltre anche i sensori ottici e infrarossi hanno portata limitata, poiché la luce riesce a penetrare solo per qualche decina di metri a lunghezze d’onda prossime a quelle della luce verde e blu. Il principio fisico dell’acustica è esattamente lo stesso che sfruttano i cetacei per comunicare e prendere coscienza dell’ambiente circostante e si basa sulla propagazione del suono, che si muove circa cinque volte più veloce che in aria e con attenuazioni estremamente più basse, riuscendo a raggiungere a seconda delle frequenze distanze anche molto grandi.
Parallelamente agli sviluppi delle tecnologie subacquee in ambito difesa, a partire dalla seconda metà del Novecento, l’industria dell’Oil&Gas sempre più impegnata nella ricerca di giacimenti petroliferi offshore a profondità via via maggiori, ha visto crescenti investimenti in tecnologie di mezzi robotici in grado di rimpiazzare i lavori una volta eseguiti dai palombari. La ricerca in questo campo ha portato all’affermazione di una classe di veicoli filoguidati dalla superficie, chiamati ROV (Remotely Operated Vehicle), in grado di compiere operazioni complesse come saldature e riparazioni e utilizzare sensoristica avanzata che oggi permette di ricreare accurate immagini acustiche tridimensionali dei fondali, delle strutture subacquee, di individuare danni su pipeline anche se ricoperte dai sedimenti del fondale grazie a opportune tecniche di imaging e sub-bottom profiling.
Ma dove è che le tecnologie utilizzate per siluri, sottomarini e ROV si stanno incontrando per soddisfare le esigenze della difesa, le necessità industriali e l’esigenza di esplorare i mari? Alzando la testa e guardando allo sviluppo dei droni avionici, è facile intuire che anche nella subacquea, la ricerca è concentrata sul perfezionamento di veicoli completamente autonomi chiamati AUV (Autonomous Underwater Vehicle), specializzati per vari tipi di missioni, dall’intelligence al patrolling, dal search and rescue al mine warfare, dalla mappatura dei fondali al monitoraggio ecologico. Gli AUV più avanzati dovranno superare i limiti posti dall’ambiente sottomarino ed essere sempre più abili a navigare con precisione, analizzare e interpretare grandi moli di dati e prendere decisioni in completa autonomia, non avendo possibilità e certezza di comunicare con alcuna stazione di controllo, se non per brevissimi periodi durante le emersioni. La ricerca in questo ambito mostra che ormai è possibile investire, oltre che su piccoli veicoli, anche su veri e propri battelli subacquei in grado di eseguire missioni della durata di alcuni mesi. L’industria italiana è dotata di tutte le competenze per avere un ruolo di primaria importanza in questa sfida dalla quale non si può tirare indietro.
Cenni sul sonar
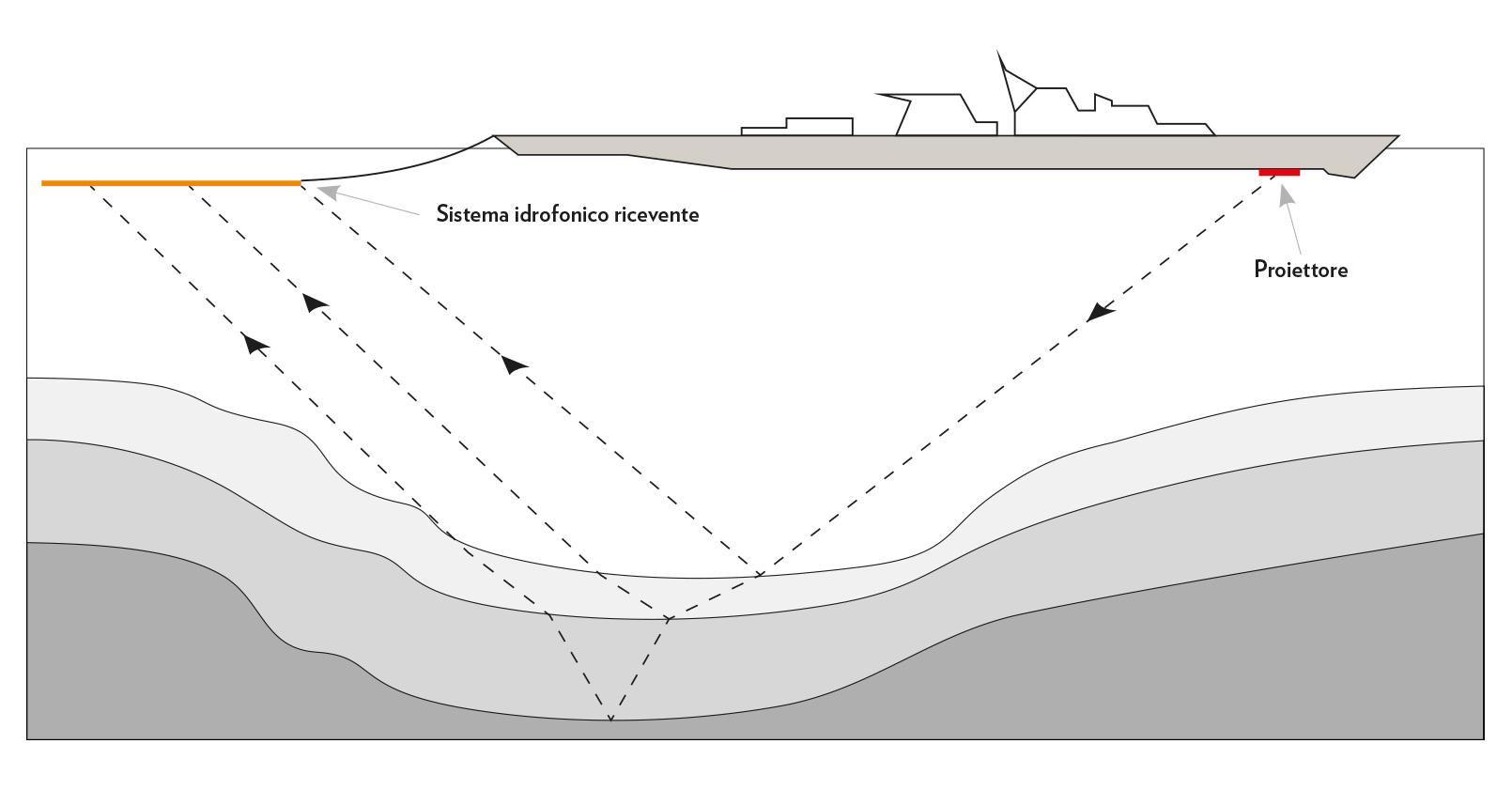
Il sonar (da Sound Navigation and Ranging) è probabilmente la più importante e diffusa applicazione dell’elettroacustica subacquea per la rivelazione di bersagli in superficie e subacquei, ma anche per la comunicazione e la navigazione. Inventato da Paul Langevin nel 1917, in Italia è stato estesamente studiato già dagli anni Cinquanta del secolo scorso e utilizzato fino agli anni Novanta nei sottomarini di classe Toti (con i famosi Apparati Ecoidrofonici IP60- IP64) e Sauro (IP470-74S). L’architettura tipica di un sonar comprende un sistema di sensori elettroacustici riceventi, un blocco di amplificazione ed elaborazione del segnale ricevuto, un trasmettitore con i relativi elementi elettroacustici trasmittenti, e dispositivi di registrazione e presentazione dei dati all’utente. I sonar passivi ascoltano i suoni irradiati da un bersaglio che emette onde acustiche utilizzando idrofoni (microfoni subacquei), rivelando segnali in un background di rumore ambientale marino e di disturbi autoprodotti, per esempio, il rumore del motore della nave o del sottomarino (ownship) che trasporta il sonar. In genere, un sonar passivo con idrofoni molto direttivi può dare informazioni sulla direzione (bearing) da cui proviene il suono emesso dal target, ma non è in grado di stimare la distanza (range) dal bersaglio, a meno di usare tecniche come la triangolazione (con due schiere, o arrays, separate di idrofoni), il ranging passivo orizzontale (HDPR, Horizontal Direct Passive Ranging, basato sulla misura della curvatura del fronte d’onda effettuata da tre arrays separati e distanti) e il ranging verticale (VDPR, Vertical DPR), basato sulla misura degli angoli da cui provengono (in generale da diverse direzioni, a causa del multipath) dei segnali intercettati dallo stesso array e delle differenze dei tempi d’arrivo all’array. Queste tecniche dipendono dall’accuratezza delle misure d’angolo, e necessitano perciò di array estesi e molto separati fra loro per ottenere stime accettabili di distanza dal target. I sonar attivi utilizzano un proiettore (projector), una sorta di altoparlante subacqueo, per generare impulsi acustici che si propagano nell’acqua e sono ricevuti come echi da un idrofono (in questo contesto anche chiamato trasduttore) o da una cortina (array) di idrofoni, lontani dalla nave per ridurre la cattura del rumore dei motori. La Figura 1 mostra un sonar a cortina trainata (towed array sonar) per l’analisi della stratificazione del fondo marino. Esistono anche sonar a visione laterale (side scan sonar), che irradiano energia trasversalmente alla direzione di rotta della nave, e che sono impiegati per la mappatura dei fondali marini. I trasduttori di emissione del segnale e di ricezione dell’eco possono anche essere installati sui due fianchi della nave, o di un sottomarino, per permettere la copertura e l’esplorazione continua delle due porzioni di fondale marino ubicate a destra e a sinistra della rotta seguita. Un’altra applicazione importante è legata alla possibilità di misurare lo scostamento della frequenza Doppler del segnale ricevuto, per determinare la velocità rispetto al fondo della nave o del sottomarino. Anche i siluri possono essere dotati di sonar per la guida verso l’obiettivo. L’eco deve essere rivelato distinguendolo dal background del rumore marino e dalla riverberazione. Tra frequenza (f) e lunghezza d’onda (λ) esiste la nota relazione λf=c, dove “c” è la velocità del suono nel mare: per un sonar, a 1000 Hz otteniamo λ=1.5 m, e a 10 Hz, λ=150 m. L’equazione sonar, che esprime il rapporto segnale-rumore (SNR) all’uscita del ricevitore in funzione dell’intensità di emissione (SL, Source Level), della perdita di propagazione (PL, Propagation Loss) del rumore (NL, Noise Level), e della forza del bersaglio (TS, Target Strength), cioè il rapporto fra l’intensità dell’eco e quella del segnale incidente al bersaglio, è la seguente:
DT = SL – 2PL + TS – NL
dove DT, la Detection Threshold, è il minimo valore di SNR al ricevitore per il quale la rivelazione può essere effettuata.
La propagazione subacquea: velocità del suono e guide d’onda acustiche
La velocità del suono nel mare (c) dipende dalla salinità (S, in parti per migliaio), dalla temperatura (T, in °C) e dalla pressione, che a sua volta dipende dalla profondità (z, in metri). Una formula empirica molto diffusa che lega c (in m/s) a queste grandezze è la seguente:
c = 1449.2 + 4.6T - 0.055 T 2 + 0.00029 T 3 + (1.34 - 0.01 T) (S - 35) + 0.016z
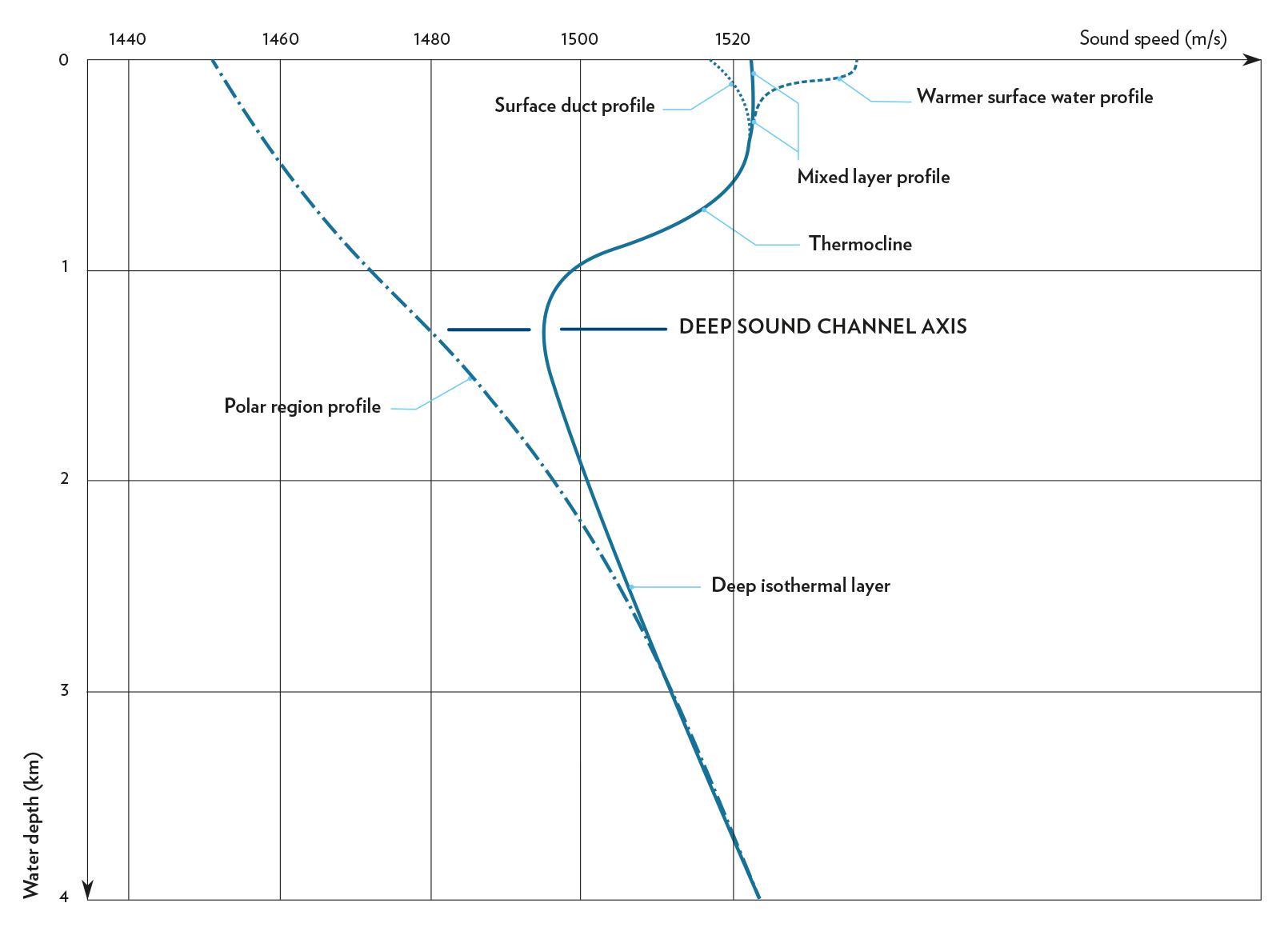
Le frequenze tipicamente associate all’acustica subacquea vanno da 10 Hz a 1 MHz. La Figura 2 illustra un tipico profilo della velocità del suono. Nelle stagioni calde, o nella parte più calda del giorno, la temperatura aumenta vicino alla superficie del mare, e quindi la velocità del suono aumenta. Nelle regioni non polari, i moti ondosi e il vento creano spesso uno strato di rimescolamento (mixed layer) a temperatura praticamente costante: in questo strato isotermico la velocità del suono aumenta con la profondità. Lo strato di transizione fra il mixed layer e le acque profonde, dove la temperatura è stabile (negli oceani è di pochi gradi sopra lo zero) e poco influenzata dalla radiazione solare, si chiama termoclino: qui la temperatura e la velocità del suono diminuiscono all’aumentare della profondità. Nel mar Mediterraneo, che ha una profondità media di 1500 metri, il termoclino può formarsi già fra 15 e 40 metri di profondità nella stagione estiva, e fra 150 e 400 metri d’inverno. Siamo nella parte alta della Figura 2, e la velocità del suono è costante fino all’inizio del termoclino. Nelle regioni polari, invece, la temperatura più bassa si rileva alla superficie, e la più piccola velocità del suono è all’interfaccia tra l’acqua e l’aria. Una curiosità storica: il termoclino veniva usato dai sottomarini tedeschi, durante la seconda guerra mondiale, per evitare di essere individuati dai sonar. Il rapido cambio di temperatura nel termoclino, infatti, crea un effetto rifrattivo, per cui le onde acustiche provenienti dagli strati superiori, vicino alla superficie, rimbalzano sul termoclino come su una superficie riflettente. Al di sotto del termoclino c’è lo strato isotermico profondo (Deep Isothermal Layer), la temperatura è costante, e c aumenta a causa dell’aumento di pressione. Come si vede dalla Figura 2, c’è una profondità alla quale la velocità del suono è minima: questa profondità è legata all’asse del cosiddetto Deep Sound Channel (DSC), che si comporta come una guida d’onda acustica capace di contenere le onde acustiche e guidarle,
con percorsi anche di migliaia di chilometri. In generale, si può pensare al mare, in particolare per acque non profonde (fino a poche centinaia di metri), come a una guida d’onda acustica, che ha per pareti il fondale marino (oppure l’inizio del termoclino) e l’interfaccia aria-acqua sulla superficie.
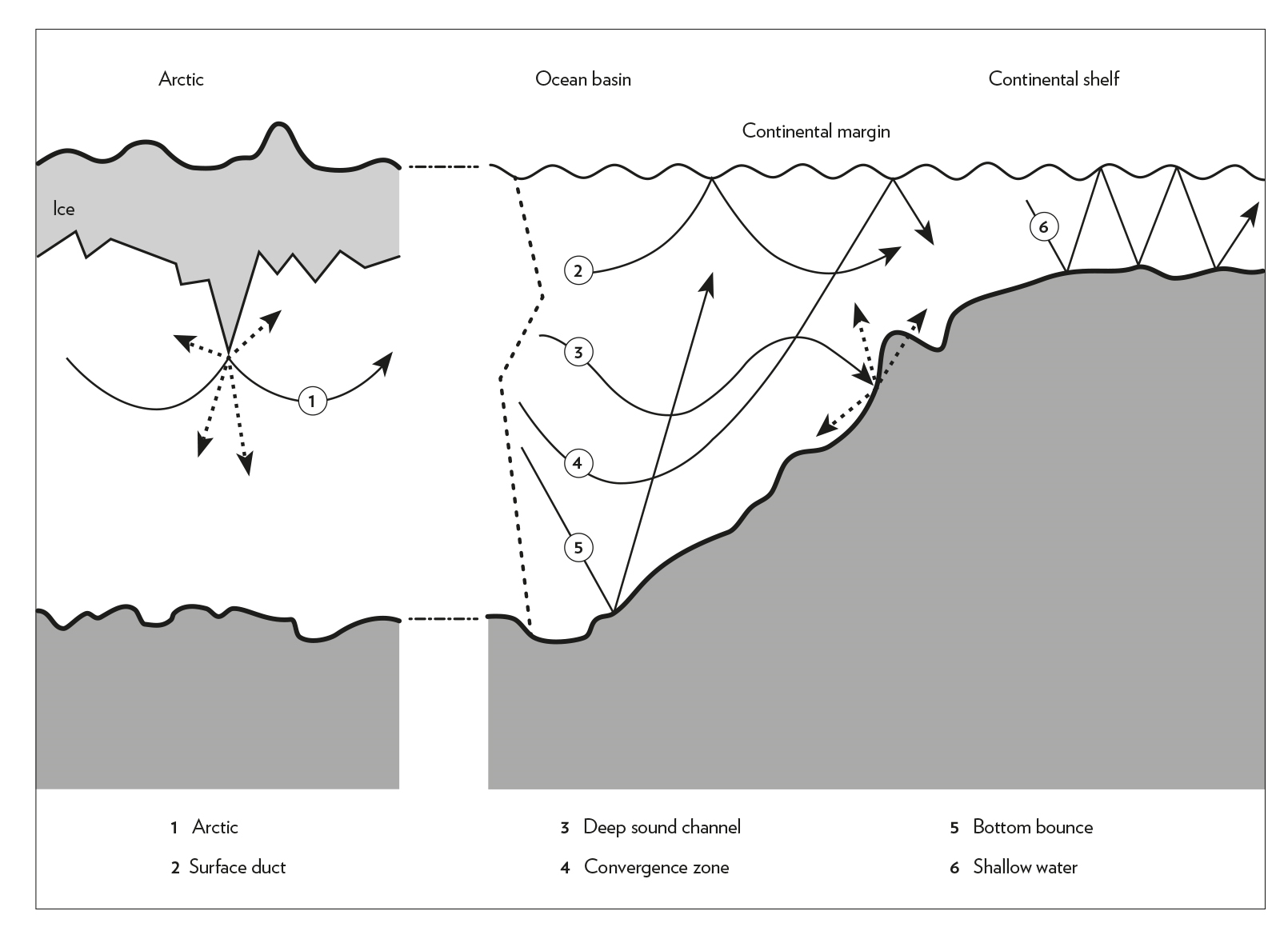
Gli strati a temperatura diversa causano velocità del suono differenti, e piegamenti dei raggi acustici verso regioni a velocità inferiori. La legge fisica che spiega questi bending (i percorsi da 1 a 4 nella Figura 3) è nota col nome di “legge di Snell”, che quantifica la rifrazione (deviazione dalla propagazione rettilinea) di un’onda che attraversa strati nei quali c varia.
Leggi anche
"La valle oscura": vivere e morire nella Silicon Valley
Da tempo ormai la Silicon Valley è al centro delle attenzioni, spesso ossessive, di opinione pubblica, intellettuali, politici e semplici curiosi.
150 anni di Marconi: il primo imprenditore globale dell’innovazione
Elettra Marconi racconta il padre e la nave laboratorio che porta il suo nome: a bordo dello yacht Elettra l’inventore della radio ha girato il mondo compiendo straordinari esperimenti
5G, la tecnologia plasma il futuro: l'umanità è un'appendice superflua
Gli spot sulla nuova rete internet sono il manifesto dell'ideologia tecnocratica: la fantascienza è già scienza.
Ambivalenza o equivalenza
Se in una chat attribuite umanità al vostro interlocutore, e questi si rivela una macchina, allora si tratta di una macchina intelligente. Un’intelligenza artificiale.